Partager :



Des chercheurs de l'académie militaire américaine de West Point ont inventé un robot pour relayer les secouristes dans les catastrophes industrielles ou naturelles. Baptisé Agro, il se lance à travers une fenêtre ou par-dessus un muret et retombe à l’endroit.
Incendie, séisme, immeuble effondré, glissement de terrain… Certaines zones accidentées sont très difficiles d’accès. Or, pour les secouristes qui doivent sauver les victimes parmi les décombres, chaque seconde compte. Pour les aider dans cette entreprise périlleuse, des chercheurs de l’académie militaire de West Point aux États-Unis ont inventé un robot d’assistance. Baptisé Agro pour Agile Ground Robot, il a été conçu pour l’inspection des lieux trop dangereux pour les humains. Sa particularité ? Quelle que soit la manière avec laquelle on le lance, il retombe toujours à l’endroit. Comme un chat sur ses pattes.
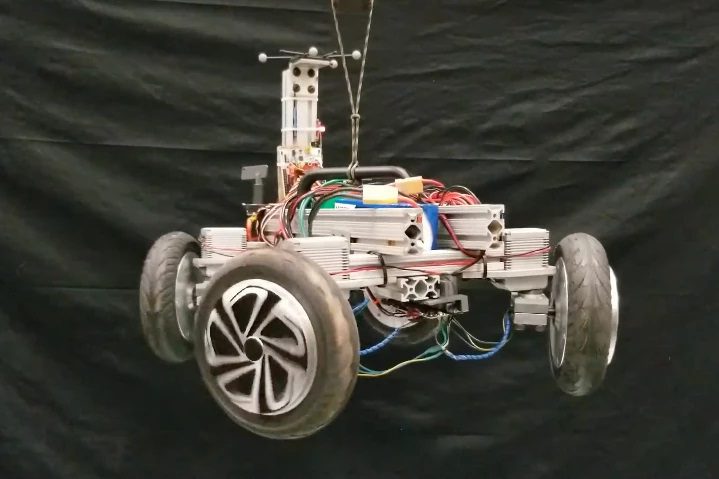
Agro embarque quatre roues motrices qui se transforment en roues de réaction en cas de chute libre.
© US Military Academy at West Point
Quatre roues de réaction
En cas de mission dans une zone impraticable, les secouristes vont pouvoir envoyer le robot à leur place. Pour cela, il suffira de le lancer par-dessus un mur ou à travers une fenêtre. Et ce, sans avoir à se préoccuper de sa chute. Agro atterrit toujours à l’endroit. Une pirouette dont le secret repose sur quatre roues motrices. Lesquelles se transforment en roues de réaction au moment de la chute.
Des roues indépendantes
A l’inverse des autres robots qui utilisent un bras mécanique pour se redresser, Agro se sert donc de roues de réaction. Un système qui lui permet de se stabiliser pendant la chute. Il faut savoir que chacune des quatre roues dispose de son propre moteur électrique, s’active et se dirige individuellement.
Correction du tangage et du roulis
Pour ce faire, une unité de mesure inertielle (IMU) détecte instantanément la chute libre. Elle déclenche alors un contrôleur proportionnel-dérivé intégré, qui met en rotation chacune des roues à des angles et des vitesses différents. De quoi corriger le tangage et le roulis durant la chute et de réduire l’impact pour atterrir sans encombre.
Bientôt des bras et des jambes
Selon l’école militaire américaine, une future version devrait comporter des jambes pliantes avec des roues aux extrémités. De sorte à mieux absorber l’impact de l’atterrissage ou encore de franchir des obstacles. À ce propos, un document devrait apporter plus de précision dans le mois. Notamment lors de la conférence internationale en ligne 2020 de l’IEEE/RSJ sur les robots et systèmes intelligents.
Ségolène Kahn
Commentez